【和歌山県】いちご狩り人気スポット2026年最新! 開園スケジュール・料金表あり
観光・おでかけ






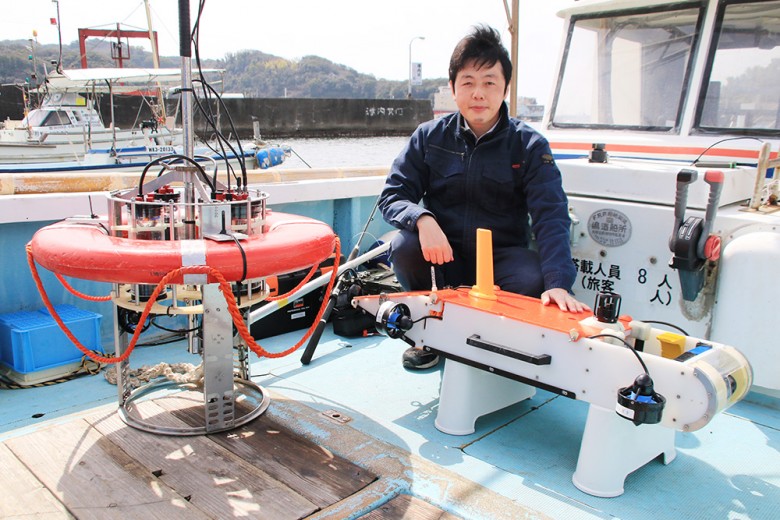
和歌山県和歌山市加太地区に分室を置く東京大学生産技術研究所の巻俊宏准教授の研究室は8~10日の3日間、海中ロボットを使った加太沖の海中・海底調査を行い、海底を撮影した画像で地図を作成するシステムの有用性を検証し、海底に設置された漁礁の状態などを調査した。持続的な漁業環境維持への貢献、港湾施設の海中点検などに活用が期待されている。
加太地域活性化協議会と加太漁業協同組合、同研究所の連携による取り組みの一環。海中ロボットによる調査は昨年3月以来、1年ぶりで、友ヶ島を構成する4島の一つ、虎島の南側、水深約30㍍の海域で行った。
今回は、前回調査でも使用した遠隔操作ロボット「ROV」に加え、プログラムに従って操縦を必要とせずに動く自律型ロボット「AUV」、超音波でAUVの位置を把握する自律ボート「ASV」を投入。思いの外速い潮の流れの中でもロボットは順調に動き、海底の撮影が進められた。
漁礁は、時間が経過すると砂に埋もれるなどの問題が生じる場合があるが、海底の状況を確認するのは困難。同協議会の稲野雅則副会長は「加太は漁業のまちなので、漁師の取り組みだけでなく、新しい技術を生かすことは大切。海中ロボットへの期待は大きい」と話す。
今回は漁礁を間近で撮影できた他、漁場の豊かさが見て取れる、プランクトンが豊富な水の濁りなども確認された。
巻准教授は「海中ロボットは海の生物資源量の調査、(港湾設備など)海のインフラの点検、洋上風力発電の設置などにも使える。実用化に向けて研究を進めていきたい」と話している。